The contact detection algorithm helps the robot determine the best time for a given leg to switch from swinging in the air to stepping on the ground. For example, if the robot steps on a light twig versus a hard, heavy rock, how it reacts — and whether it continues to carry through with a step, or pulls back and swings its leg instead — can make or break its balance.“When it comes to switching from the air to the ground, the switching has to be very well-done,” Kim says. “This algorithm is really about, ‘When is a safe time to commit my footstep?’”
The contact detection algorithm helps the robot determine the best time for a given leg to switch from swinging in the air to stepping on the ground. For example, if the robot steps on a light twig versus a hard, heavy rock, how it reacts — and whether it continues to carry through with a step, or pulls back and swings its leg instead — can make or break its balance.“When it comes to switching from the air to the ground, the switching has to be very well-done,” Kim says. “This algorithm is really about, ‘When is a safe time to commit my footstep?’”Meet the MIT’s Blind Cheetah Robot
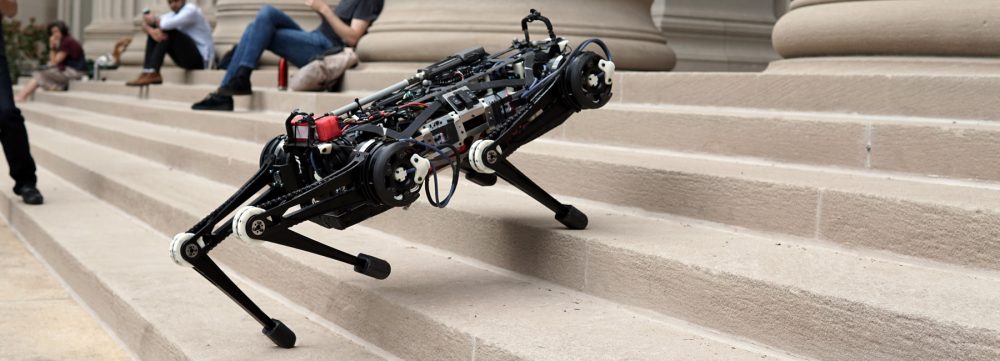
Improved design may be used for exploring disaster zones and other dangerous or inaccessible environments.MIT’s Cheetah 3 robot can now leap and gallop across rough terrain, climb a staircase littered with debris, and quickly recover its balance when suddenly yanked or shoved, all while essentially blind.The 90-pound mechanical beast — about the size of a full-grown Labrador — is intentionally designed to do all this without relying on cameras or any external environmental sensors. Instead, it nimbly “feels” its way through its surroundings in a way that engineers describe as “blind locomotion,” much like making one’s way across a pitch-black room.“There are many unexpected behaviours the robot should be able to handle without relying too much on vision,” says the robot’s designer, Sangbae Kim, associate professor of mechanical engineering at MIT. “Vision can be noisy, slightly inaccurate, and sometimes not available, and if you rely too much on vision, your robot has to be very accurate in position and eventually will be slow. So we want the robot to rely more on tactile information. That way, it can handle unexpected obstacles while moving fast.”Making a commitmentThe Cheetah 3 can blindly make its way up staircases and through unstructured terrain, and can quickly recover its balance in the face of unexpected forces, thanks to two new algorithms developed by Kim’s team: a contact detection algorithm, and a model-predictive control algorithm. The contact detection algorithm helps the robot determine the best time for a given leg to switch from swinging in the air to stepping on the ground. For example, if the robot steps on a light twig versus a hard, heavy rock, how it reacts — and whether it continues to carry through with a step, or pulls back and swings its leg instead — can make or break its balance.“When it comes to switching from the air to the ground, the switching has to be very well-done,” Kim says. “This algorithm is really about, ‘When is a safe time to commit my footstep?’”
The contact detection algorithm helps the robot determine the best time for a given leg to switch from swinging in the air to stepping on the ground. For example, if the robot steps on a light twig versus a hard, heavy rock, how it reacts — and whether it continues to carry through with a step, or pulls back and swings its leg instead — can make or break its balance.“When it comes to switching from the air to the ground, the switching has to be very well-done,” Kim says. “This algorithm is really about, ‘When is a safe time to commit my footstep?’”
The contact detection algorithm helps the robot determine the best time for a given leg to switch from swinging in the air to stepping on the ground. For example, if the robot steps on a light twig versus a hard, heavy rock, how it reacts — and whether it continues to carry through with a step, or pulls back and swings its leg instead — can make or break its balance.“When it comes to switching from the air to the ground, the switching has to be very well-done,” Kim says. “This algorithm is really about, ‘When is a safe time to commit my footstep?’”